")










QR 코드

문의하기



주소
22 호

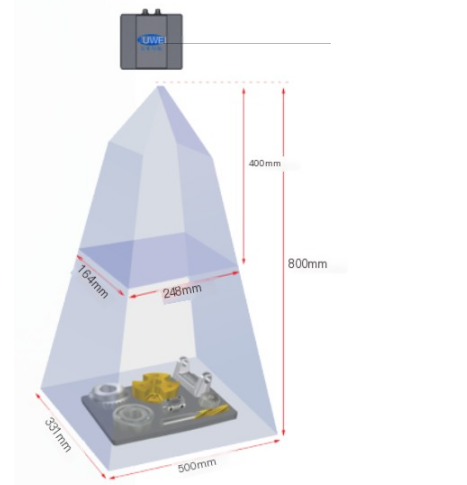
알루미늄 합금 판금 처리 용 자동 조립 라인에서 피더의 배치 정확도는 제품의 최종 품질 및 생산 효율에 직접적인 영향을 미칩니다. 피더가 바쁜 생산 라인의 지정된 위치에 공작물을 정확하게 배치 할 수 있도록하는 방법은 우리가 직면 한 주요 과제가되었습니다. 오늘, 우리는 3D 시각적 안내 솔루션을 공개하여 피더의 배치 정확도가 1500mm의 필드와 2 천만 개의 카메라 해상도로 ± 2mm에 도달 할 수 있도록합니다.

1 d 고 정밀 3D 비전 시스템
첫째, 우리의 솔루션은 고정밀 3D 비전 시스템을 채택합니다. 이 시스템은 고속 카메라와 고급 이미지 처리 알고리즘을 사용하여 생산 라인에서 실시간 공작물 정보를 캡처하고 3D 재구성을 수행합니다. 1500mm의 시야 너비 필드 내에서 우리 시스템은 공작물의 모든 세부 사항을 명확하게 식별하여 후속 배치에 대한 정확한 데이터 지원을 제공 할 수 있습니다.
2 or 지능형 알고리즘 최적화
그러나 고전화 시각 시스템에만 의존하는 것만으로는 충분하지 않습니다. 재료의 배치 정확도가 ± 2mm에 도달하려면 알고리즘을 최적화해야합니다. 우리의 R & D 팀은 광범위한 실험 및 데이터 분석을 통해 시각적 인식, 경로 계획 및 로봇 제어와 같은 다양한 측면을 정확하게 조정하고 최적화했습니다.
시각적 인식 측면에서, 우리는 공작물의 위치와 자세를 정확하게 식별 할 수있는 고급 기능 추출 및 매칭 알고리즘을 채택했습니다. 경로 계획 측면에서 로봇의 모션 궤적, 공작물의 모양 및 크기 등과 같은 다양한 요소를 고려하여 로봇을 최적의 경로를 따라 배치 할 수 있도록합니다. 로봇 제어 측면에서, 우리는 고정밀 서보 모터 및 컨트롤러를 사용하여 로봇이 사전 설정 경로와 속도에 따라 움직일 수 있도록합니다.
3 adjust 실시간 피드백 및 조정
또한, 당사의 시스템은 실시간 피드백 및 조정을 제공 할 수 있습니다. 로봇 배치 과정에서 당사의 시스템은 공작물의 위치와 자세를 실시간으로 모니터링하고 모니터링 결과를 제어 시스템에 공급합니다. 실제 배치 위치와 사전 설정 위치 사이에 편차가있는 경우 제어 시스템은 즉시 로봇을 미세 조정하여 최종 배치 정확도가 ± 2mm에 도달하도록합니다.
3D 시각 안내 솔루션을 통해 여러 알루미늄 합금 판금 처리 기업에서 피더 배치 정확도를 성공적으로 개선했습니다. 실제 응용 분야에서 우리의 시스템은 생산 효율성을 향상시킬뿐만 아니라 결함을 줄여 기업에 실질적인 경제적 이익을 가져옵니다.
요약하면, 우리의 3D 시각 안내 솔루션은 고정밀 비주얼 시스템, 지능형 알고리즘 최적화, 실시간 피드백 및 조정을 통해 알루미늄 합금 시트 처리에서 피더의 배치 정확도를 성공적으로 개선했습니다. 앞으로 솔루션을 계속 최적화하고 개선하여 더 많은 기업에보다 효율적이고 정확한 자동 처리 솔루션을 제공 할 것입니다.
22 호
