











QR 코드

문의하기



주소
22 호

프로젝트 개요
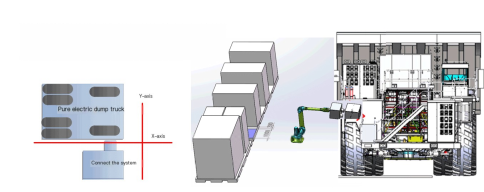
이 프로젝트는 Shanxi 지역의 실내 생산 조건에서 고객의 충전 요구를 충족시키기 위해 효율적이고 안정적인 덤프 트럭 자동 충전 시스템을 설계하는 것을 목표로합니다. 이 시스템은 엔지니어링 차량의 무인 운영 및 제어를 달성해야하며, 생산 라인의 지속적인 운영 요구 사항을 충족시키기 위해 포인트 A 및 B의 핸들링 및 자동 충전 기능 만 완료해야합니다.
시스템 구성
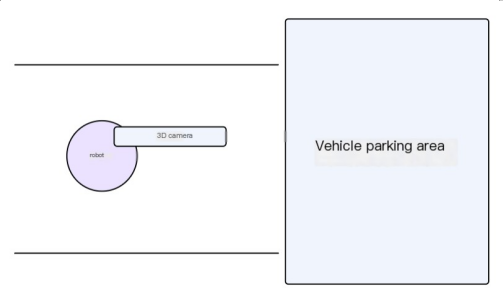
시각적 포지셔닝 시스템 : 덤프 트럭에서 충전 포트의 정확한 위치를 달성하기 위해 고정밀 카메라 및 시각적 알고리즘을 활용합니다. 시각적 시스템은 먼지와 직사광선에 저항 할 수 있어야하며 다양한 실내 환경에서 안정적인 작동을 보장해야합니다.
로봇 및 건 푸시 메커니즘 : 팔 스팬이 3m 이상인 산업용 로봇이 선택되어 특별히 설계된 건 밀기 메커니즘이 장착되어 있습니다. 건 푸시 메커니즘은 충전 총을 충전 포트에 정확하고 빠르게 삽입 할 수 있도록 충분한 추력과 정확도를 가져야합니다.
충전 시스템 : 3 메가 와트의 고출력 충전 장비가 장착되어 덤프 트럭에 단기간에 완전히 충전되고 생산 효율성을 향상시킬 수 있습니다.
제어 시스템 : 통합 제어 시스템을 통해 시각적 포지셔닝, 로봇 모션 및 충전 프로세스의 정확한 제어를 수행 할 수 있습니다. 제어 시스템은 자동화 및 인텔리전스 특성이 높고 무인 자동 충전을 달성 할 수 있어야합니다.
워크 플로
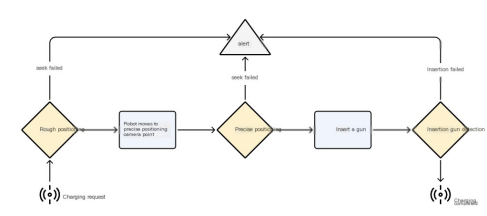
셀프 덤핑 트럭 포지셔닝 : 시각적 포지셔닝 시스템을 통해 덤프 트럭의 충전 포트 위치를 식별하고 찾으십시오.
로봇 모션 : 제어 시스템은 로봇이 시각적 포지셔닝 결과에 따라 덤프 트럭의 충전 포트 근처에서 이동하도록 안내합니다.
푸시 총 삽입 : 로봇에는 푸시 건 메커니즘이 장착되어있어 충전 건을 덤프 트럭의 충전 포트에 정확하고 빠르게 삽입합니다.
충전 프로세스 : 충전 시스템은 사전 설정 전원 수준 또는 시간에 도달 할 때까지 덤프 트럭을 충전하기 시작합니다.
로봇 대피 : 충전이 완료된 후 로봇은 충전 포트를 대피하고 다음 덤프 트럭의 도착을 기다립니다.
주요 기술
시각적 포지셔닝 기술 : 딥 러닝과 같은 알고리즘을 사용하여 시각적 포지셔닝 시스템의 정확성과 안정성을 향상시킬 수 있습니다.
로봇 제어 기술 : 로봇 모션 궤적 및 속도를 최적화하여 충전 효율을 향상시킵니다.
건 푸시 메커니즘의 설계 : 건 밀기 메커니즘이 구조적 압축성과 신뢰성을 고려하면서 충분한 추진 메커니즘이 충분히 추력과 정확성을 갖도록합니다.
위험 대응
실내 환경 보호 : 깨끗하고 건조한 실내 환경을 보장하고, 먼지와 직사광선이 시각적 위치 시스템에 미치는 영향을 줄입니다.
하드웨어 유지 보수 : 정상적인 작동을 보장하기 위해 로봇 및 시각적 포지셔닝 시스템과 같은 하드웨어를 정기적으로 유지하고 유지합니다.
전문 평가 : 전문가를 초대하여 솔루션의 안전성과 타당성을 보장하기 위해 건 밀기 메커니즘, 충전 시스템 등을 평가하고 최적화하십시오.
22 호
