











QR 코드

문의하기



주소
22 호

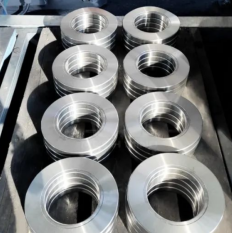
제조 산업의 급속한 개발로 인해 자동화 및 지능형 생산에 대한 수요는 매일 증가하고 있습니다. 특히 고정밀 및 고효율 생산 시나리오에서 전통적인 수유 방법은 더 이상 생산 요구를 충족시키기에 충분하지 않습니다. 3D Vision 기술의 출현은 관성 고리와 같은 복잡한 워크 피스의 정확한 공급을위한 새로운 솔루션을 제공합니다.
3D 비전 기술의 기본 원칙은 컴퓨터를 통한 객체의 3 차원 공간 정보를 처리하고 분석하고 객체 인식, 탐지, 추적 및 측정과 같은 작업을 달성하는 것입니다. 관성 고리의 정확한 공급을 적용 할 때, 3D 비전 기술은 관성 고리의 3 차원 공간 정보를 포착하여 로봇에 정확한 파악 위치와 자세를 제공하여 관성 고리의 정확한 공급을 달성합니다.
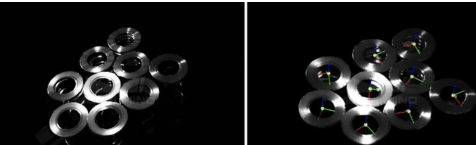
영상 알고리즘 측면에서 3D Vision Technology는 고급 알고리즘을 채택하여 표면 반사 및 관성 고리의 오일 필름 적용 범위와 같은 복잡한 상황에 대처합니다. 알고리즘을 최적화함으로써 시스템은 명확하고 정확한 포인트 클라우드 데이터를 생성하여 후속 인식 및 캡처를위한 견고한 기초를 제공 할 수 있습니다.
카메라 선택 측면에서 3D 비전 시스템은 고해상도, 대형 시야 및 대형 심도의 카메라를 선택해야합니다. 이 유형의 카메라는 관성 링의 완전한 모양 및 크기 정보를 캡처하여 로봇이 파악 프로세스 중에 대상 위치를 정확하게 찾을 수 있도록합니다. 동시에, 큰 피사계 심도의 특징은 카메라가 다른 거리에서 명확한 이미징 효과를 유지하여 공급의 정확도를 더욱 향상시킬 수있게합니다.
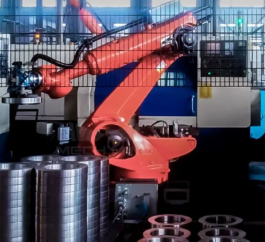
이미징 알고리즘 및 카메라 선택 외에도 3D 비전 기술은 로봇 제어 시스템과 밀접하게 통합되어야합니다. 관성 링의 실시간 3 차원 공간 정보를 로봇 제어 시스템에 전송함으로써 로봇은 관성 링의 위치를 정확하게 찾아 파악할 수 있습니다. 이 실시간 정보 교환을 통해 로봇은 다양한 사양의 관성 링에 직면 할 때 파악 전략을 빠르게 조정하여 유연한 생산을 달성 할 수 있습니다.
3D 비전 기술은 관성 고리의 정확한 공급 과정에서 중요한 역할을 해왔습니다. 이미징 알고리즘을 최적화하고, 적절한 카메라를 선택하고, 로봇 제어 시스템과 밀접하게 협력함으로써,이 기술은 효율적이고 정확한 파악을 달성하고 생산 효율성을 향상 시키며 생산 비용을 줄입니다.
22 호
